openModelicaのOMEditにて、
ジョイントに関するコンポーネントを見てみました。
(Modelica.Mechanics.MultiBody.Joints)
ベースモデル:Modelica.Mechanics.MultiBody.Examples.Elementary.DoublePendulum
fixedTranslationは非表示
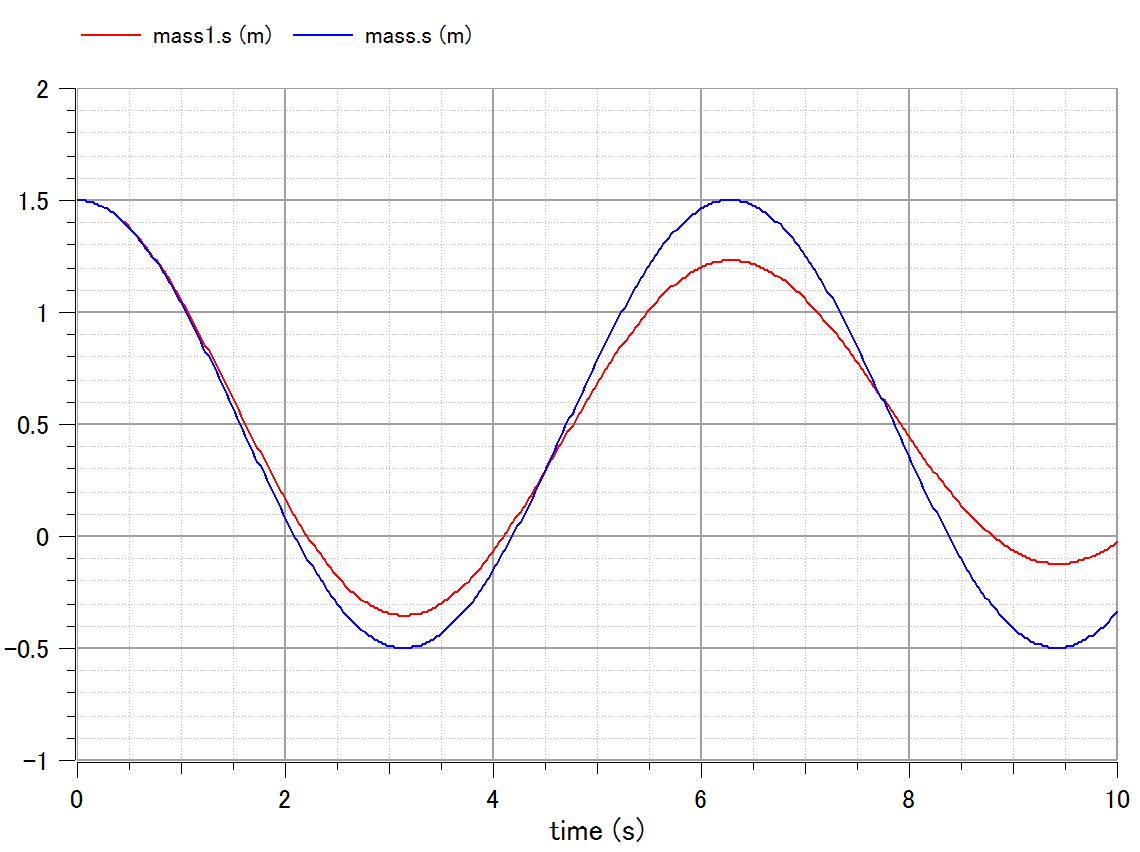
Prismatic

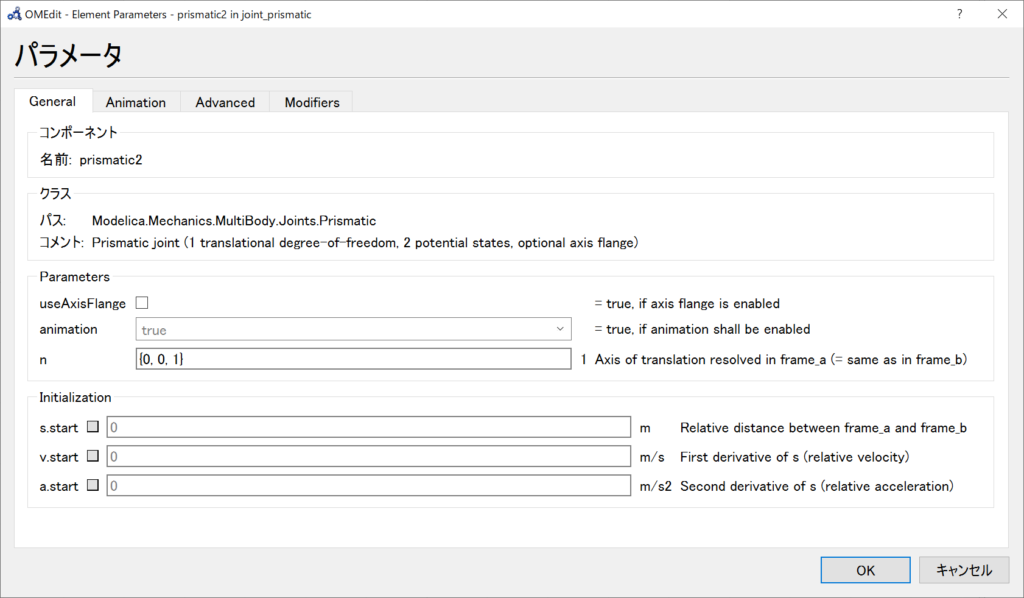
n{0,0,1} 1が入力された方向に並進
サンプルファイル : joint_prismatic.mo
Revolute

n{0,0,1} 1が入力された方向に回転軸が定義
サンプルファイル : joint_Revolute.mo
cylindrical

n{0,0,1} 1が入力された方向に回転軸が定義され、回転軸方向も変位する。
サンプルファイル : joint_cylindrical.mo
Universal

XとX軸設定でも計算は実行される。
サンプルファイル : joint_Universal.mo
コメント