impactで物体を回転させてみました。剛体として制御しています。
対象 六面体要素
モデル化 impactにてモデル化
条件 X軸回りに回転させる。0.01秒で180度になるようにπ×100(ラジアン/s)とする。
参照元 ー
境界条件 六面体に関連付けた制御節点にX軸回転速度を定義する。
結果
上記図
作業 impact
モデルはimpactのプリプロセッサー部で作成しました。
その他の参考 :T305 プリ作業tips impact
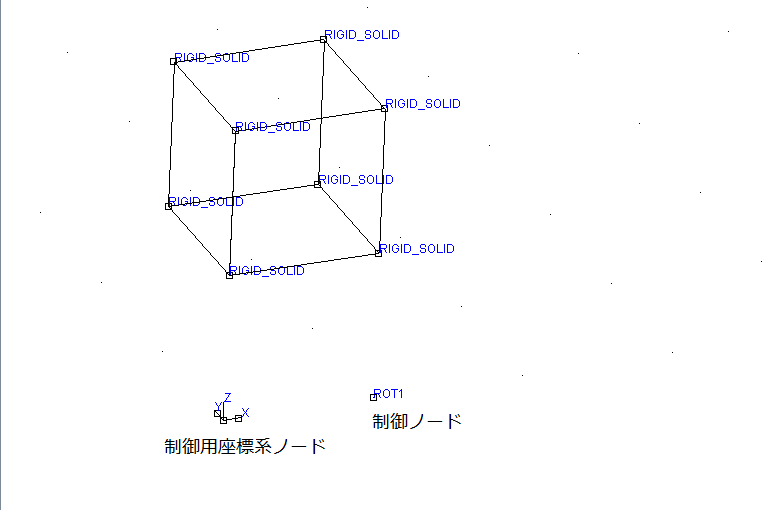
六面体の節点は、制御ノードに関連つけられています(剛体接続)。
制御ノードの回転は、制御用座標系ノードによって規定される速度で操作されます。
座標系のノードは、原点を1としてX軸方向に2、Y軸方向に3としています。
座標の定義は[1,2,3]と入力しており、これはグローバルな元の座標系と同じにしています。
サンプルファイル
(impact rot box) rot_box.in
物性値は仮です。制御ノードは1000、制御用座標系ノードは1~3で構成しています。
入力データと変位結果の確認
サンプルファイルは、X軸回りの速度314.16rad/s 解析時間0.02まで計算しています。
おおよそ、0.01秒で180度の位置まできます。角速度はラジアンで入力することになります。
2D要回転
CONSTRAINTS OF TYPE Rigid_Body cmass1 master_node =171 CONSTRAINTS OF TYPE Boundary_Condition rot1 vrz = 3.14 vx = 0 vy = 0 vz = 0 vrx = 0 vry = 0
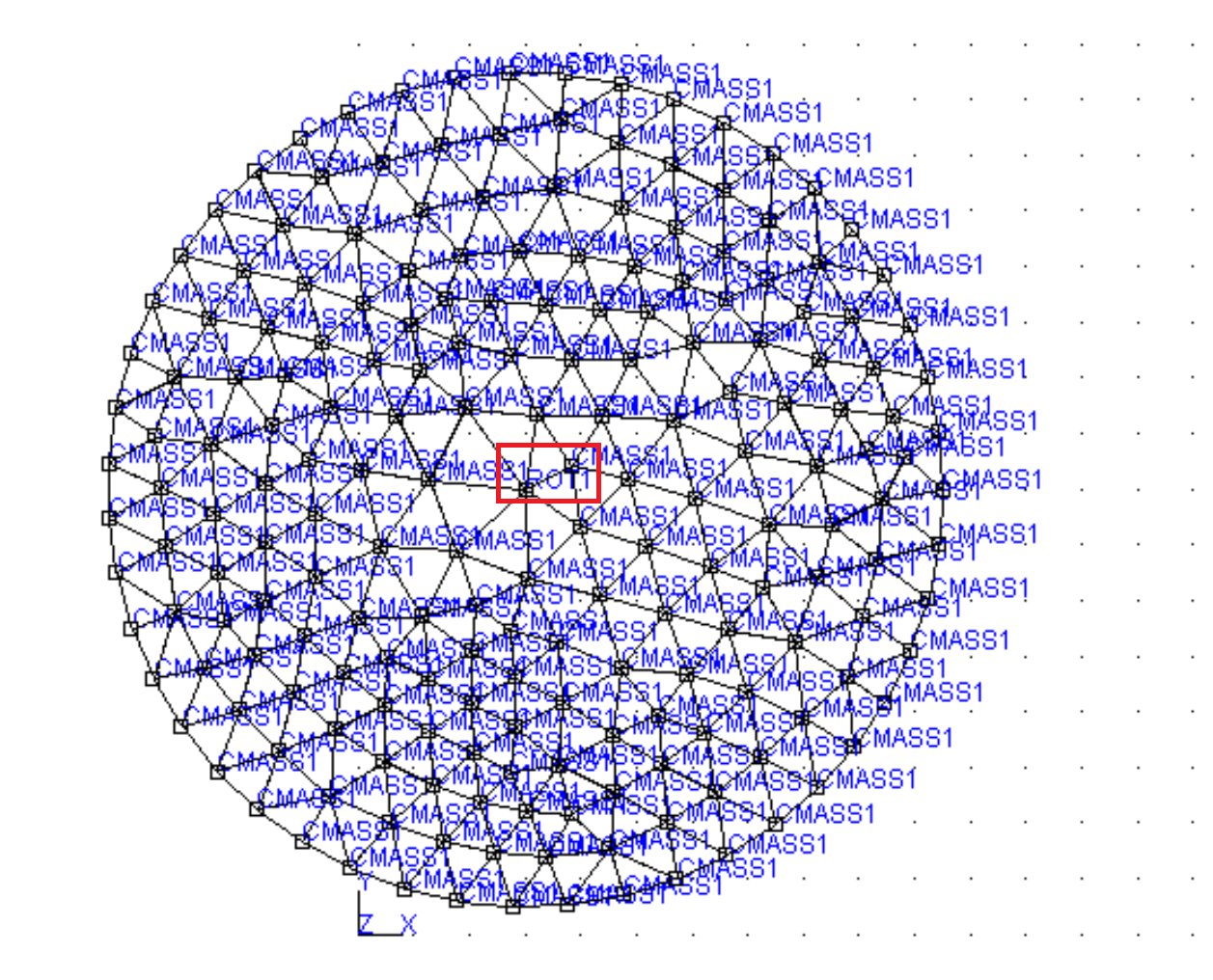
中心にrot1を設定して、他の節点に剛体条件をセットします。
サンプルファイル:2D_rigitBody.in
コメント